起重机自动控制系统,属于自动控制技术领域。旨在解决现有技术无法对起重机进行远程指挥,人工指挥劳动强度大,设备故障检修麻烦的问题。本实用新型的起重机自动控制系统包括中央处理模块,动作指令模块,检测模块及显示模块,控制模块分别与动作指令模块,检测模块及显示模块连接。
本实用新型的有益效果是:实现起重机的远程指挥控制,保证了生产过程的安全,提高了工作效率.采用LC+变频器+传感器+定位系统的系统构架,可以实现远程操作/本地操作/遥控操作的手动/半自动/全自动的操作切换。

主要技术内容与特色
1、精确定位技术
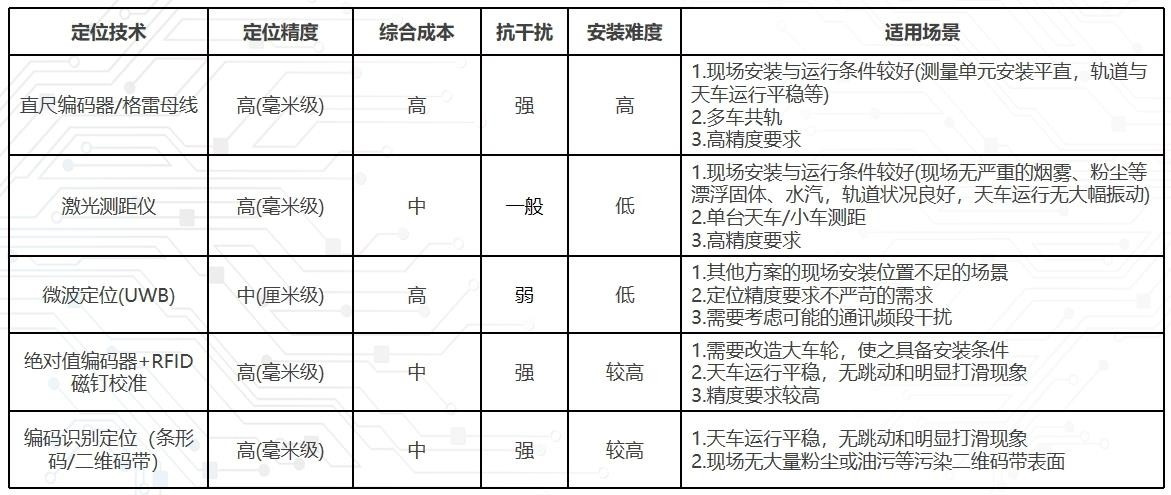
天车的定位包括大车、小车、主钩三个方向上的位置检测,X轴定位测量大车行驶距离,Y轴定位测量小车行驶距离,Z轴定位用来测量行车夹钳距地面的高度值。定位的准确性不仅直接影响吊运动作的正确性,还与安全生产密切相关。当前常用的定位技术如下表所示:
2、无线通信技术
控制系统需要对行车的运行状态进行实时监控,因此要利用无线局域网通信技术将行车的实时位置和传感称重数据发送出去,并接收控制系统的动作指令。无人天车系统中的数据传输必须满足可靠性、稳定性及实时性的要求,同时由于整个库区设备数量较多,还需要具备多个节点组网通信的功能。
3、防摇摆控制技术
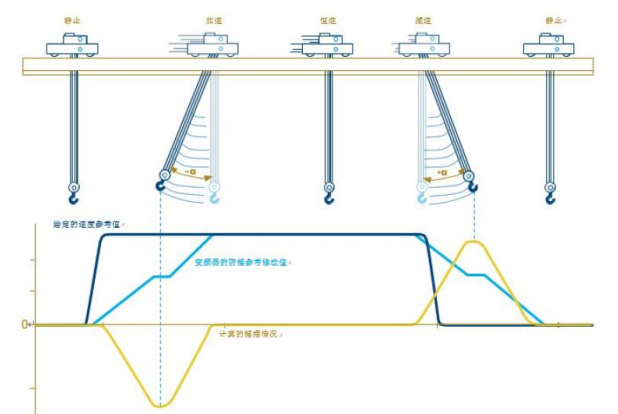
起重机实际作业时,抓斗在小车方向和大车方向均有明显的摆动情况,严重影响了抓斗行车的作业效率;抓斗防摇系统可有效解决此类问题。
防摇系统可以达到以下要求:在自动工况下,无论空载和重载,小车从全速运行到完全停止的工况下,抓斗摆动一个周期内,电子防摇系统能将抓斗摆动幅度控制在±100mm以内,并趋于静止。电子防摇系统
电子防摇程序可以预置在PLC和变频器内置的程序进行防摇的控制。大车走行启动后,控制程序根据传递函数的位置环和速度环进行耦合,保证定位系统在1mm精度的同时机车底部晃动小于30mm,同时3个摆动周期内停止摆动,停止后定位精度在20mm范围内。